|
Hi! I am a second-year Ph.D student at HKUST, under the supervision of Prof. Ping Tan. I hold a Master's degree from Peking University and a Bachelor's degree from Xidian University. Additionally, I have interned at IDEA Research, Unitree Robotics, and Shanghai AI Lab. Before my postgraduate studies, I worked at DH-Robotics as one of the initial team members (the first engineer), where I led a team in the development of electronics and algorithms for robot grippers and arms. Email / CV / Google Scholar / Github / Zhihu |

|
|
My research interests lie in enabling humanoids to interact agilely and robustly with the world (with objects, scenes, humans, and other agents). Since 2023, my work has focused on developing the Interaction Imitation paradigm, under which I have led a series of projects including PhysHOI, SkillMimic, SkillMimic-V2, HOP-HOT, and HumanX. My long-term goal is endowing humanoids with dynamic interaction capabilities that surpass human performance. |
|
|
Yinhuai Wang*, Qihan Zhao*, Yuen Fui Lau*, Runyi Yu, Hok Wai Tsui, Qifeng Chen, Jingbo Wang, Jiangmiao Pang, Ping Tan arXiv 2026 project page / arXiv / code We present HumanX, a full-stack framework that compiles human video into generalizable, real-world interaction skills for humanoids, without task-specific rewards. |
|
|
Yuen Fui Lau*, Qihan Zhao*, Yinhuai Wang*(project lead), Runyi Yu, Hok Wai Tsui, Qifeng Chen, Ping Tan ICRA 2026 project page / arXiv / code We introduce Switch, a hierarchical whole-body control system that enables humanoid robots to perform agile and seamless skill switching between highly dynamic skills. |
|
|
Yinhuai Wang*, Runyi Yu*, Hok Wai Tsui*, Xiaoyi Lin*, Hui Zhang, Qihan Zhao, Ke Fan, Miao Li, Jie Song, Jingbo Wang, Qifeng Chen, Ping Tan arXiv 2025 project page / arXiv / code We present a system for learning generalizable hand-object tracking controllers purely from synthetic data, without requiring any human demonstrations. |
|
Runyi Yu*, Yinhuai Wang*(project lead), Qihan Zhao*, Hok Wai Tsui, Jingbo Wang, Ping Tan, Qifeng Chen SIGGRAPH 2025 project page / arXiv / code By introducing novel data augmentation techniques for skill transitions and recovery patterns, we acquire robust and generalizable interaction skills from noisy and sparse HOI demonstrations. |
|
|
Yinhuai Wang*, Qihan Zhao*, Runyi Yu*, Hok Wai Tsui, Ailing Zeng, Jing Lin, Zhengyi Luo, Jiwen Yu, Xiu Li, Qifeng Chen, Jian Zhang, Lei Zhang, Ping Tan CVPR 2025, 🏆 Highlight project page / arXiv / code We for the first time enable simulated humanoids to learn basketball interaction skills purely from HOI demonstrations. The learned interaction skills can be reused for complex and long-horizon tasks such as continuous scoring. |
|
|
Yinhuai Wang, Jing Lin, Ailing Zeng, Zhengyi Luo, Jian Zhang, Lei Zhang Technical Report, 2023 project page / arXiv / code We enable physically simulated humanoids to imitate interactions from video demonstrations, without designing task-specific rewards. |
|
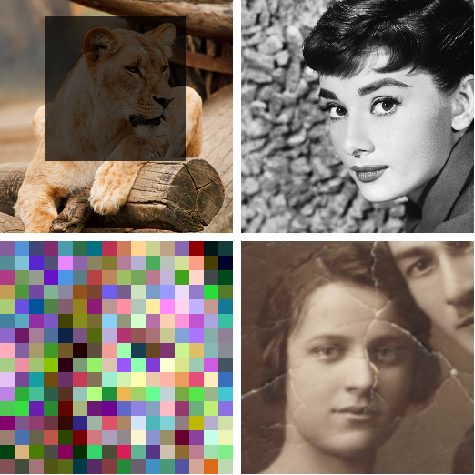
Yinhuai Wang*, Jiwen Yu*, Jian Zhang ICLR 2023, 🏆 Oral Presentation project page / arXiv / code We bring Range-Null space Decomposition (RND) into diffusion models, enabling diverse image restoration tasks in a zero-shot manner, without extra training or optimization. |
|
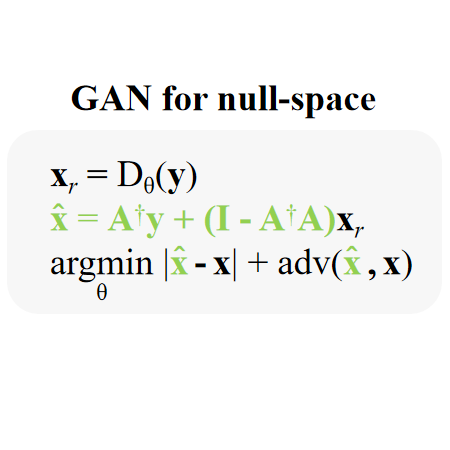
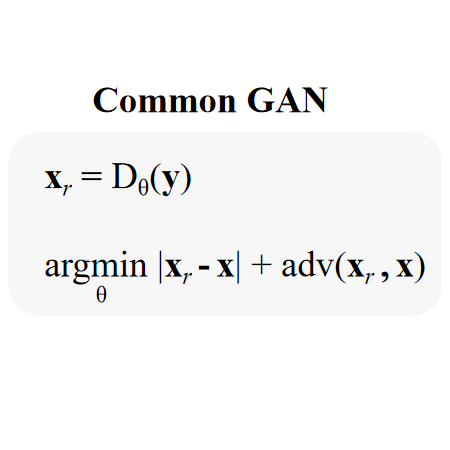
Yinhuai Wang, Yujie Hu, Jiwen Yu, Jian Zhang AAAI 2023, 🏆 Oral Presentation code / arXiv We bring Range-Null space Decomposition (RND) into GAN-Prior based SR models to accelerate the convergence and ensure the downsampling consistency. |

|
Jiwen Yu, Yinhuai Wang, Chen Zhao, Bernard Ghanem, Jian Zhang ICCV, 2023 code / arXiv / FreeDoM is a simple but effective training-free method generating results under control from various conditions using unconditional diffusion models. |
|
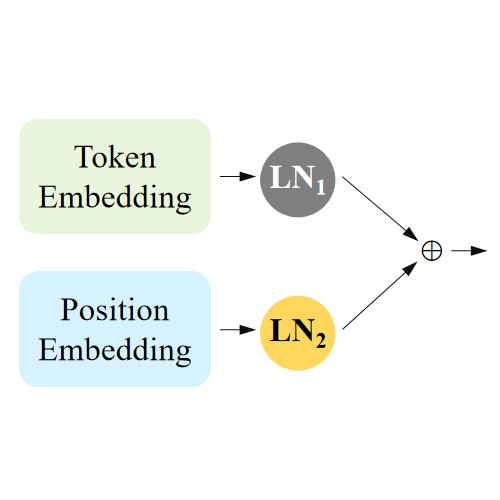
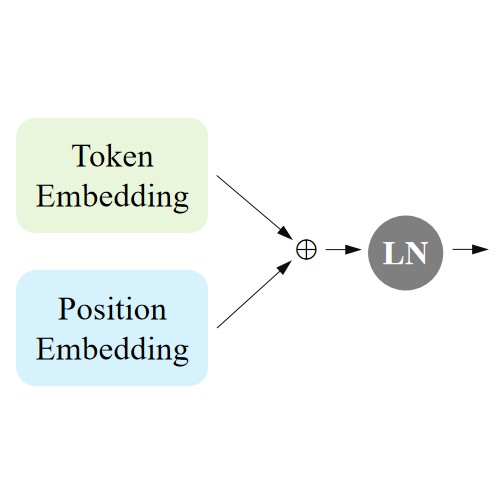
Runyi Yu*, Zhennan Wang*, Yinhuai Wang*, Kehan Li, Chang Liu, Haoyi Duan, Xiangyang Ji, Jie Chen, ICCV, 2023 code / arXiv We find that simply adding an independent LN to each layer can robustly improve the performance of vision transformers. |
 
|
Yinhuai Wang, Yujie Hu, Jian Zhang AAAI, 2022 code / arXiv We fuse the generative prior and the image prior dynamically according to the degradation levels. |
|
|
 |
I had a wonderful trip from 2019 to 2020! - Riding bicycle through Xinjiang, Tibet, Nipel, and India. - Footprints span Germany, Malaysia, Nipel, India, UAE, Turkey, Egypt, Saudi Arabia, Ethiopia, Kenya, Tanzania, Rwanda, Hongkong, Macao, Taiwan, and Mainland China. |
|
- I built a two-axis robot arm with self-designed motor driver, FK & IK algorithm, trajectory generation, and impedance control. 2018~2019 Zhihu |
 |
In 2017-2018, I developed an electronic control system for industrial grippers that achieved widespread commercial success in industry. I did: - The PCB design. - FOC Motor Control algorithm. - Online Trajectory Generation algorithm. - Force Control and Impedance Control algorithm. |

|
- 2022, Merit Student of Peking University. - 2023, Merit Student of Peking University. - 2024, Outstanding Graduates of Peking University. - 2024, Outstanding Graduates of Beijing. - 2024, Outstanding Graduation Thesis, Peking University. |

|
Reviewer for CVPR, ICCV, ICLR, NeurIPS, SIGGRAPH, AAAI, TIP, IJCV, and TPAMI. |
|
This cool template is stolen from Jon Barron! |